Improved Dynamic Subjective Logic Model with Evidence Driven
Article information
Abstract
In Jøsang’s subjective logic, the fusion operator is not able to fuse three or more opinions at a time and it cannot consider the effect of time factors on fusion. Also, the base rate (a) and non-informative prior weight (C) could not change dynamically. In this paper, we propose an Improved Subjective Logic Model with Evidence Driven (ISLM-ED) that expands and enriches the subjective logic theory. It includes the multi-agent unified fusion operator and the dynamic function for the base rate (a) and the non-informative prior weight (C) through the changes in evidence. The multi-agent unified fusion operator not only meets the commutative and associative law but is also consistent with the researchers’s cognitive rules. A strict mathematical proof was given by this paper. Finally, through the simulation experiments, the results show that the ISLM-ED is more reasonable and effective and that it can be better adapted to the changing environment.
1. Introduction
With the development of large-scale distributed systems, such as cloud computing, the Internet of things, and the ad-hoc network, the security and reliability of the systems are more concerned. Because these systems have open, dynamic, and uncertain characteristics, the corresponding model theories put forward higher requirements. At present, the trust relationship between nodes is mainly expressed by the trust model. According to the theoretical basis for trust, the trust model can be divided into the following types: a trust model based on fuzzy logic, a trust model based on reputation, and a trust model based on subjective logic, node behavior, analytic hierarchy process, and fuzzy logic [1]. Among them the trust model based on subjective logic, which was proposed by Jøsang, is more suitable for modeling the trust of a dynamic uncertainty object. Jøsang learned from the D-S evidence theory. He put the uncertainty into the model and proposed the subjective logic theory. On the basis of this, he modeled the trust relationship, and obtained very good results. In Jøsang’s subjective logic, the base rate (a) is used to calculate the expectation of an opinion and the non-informative prior weight (C) is an important parameter for calculating the uncertainty of the opinion. However, there are shortcomings in that the base rate (a) and non-informative prior weight (C) are constant and are not able to change dynamically in Jøsang’s subjective logic and that the fusion operator will have unreasonable results in a situation that has high conflict with the evidence. If we can solve these problems, it will promote the improvement and development of Jøsang’s subjective logic theory.
The rest of the paper is organized as follows: Section 2 provides the related work that has already been carried out on this subject. Section 3 introduces the fusion operator in Jøsang’s subjective logic and its issues. Establishes Improved Subjective Logic Model with Evidence Driven (ISLM-ED) in Section 4. Sections 5 describes our experimental setup, gives a evaluation of the performance of our model, and verifies the rationality of the model. Section 6 concludes the paper.
2. Related Work
In recent years, the research on the Jøsang’s subjective logic trust model has achieved fruitful results. Subjective logic theory proposed by Jøsang [2] can express subjective uncertainty. Its beta trust model, which was successfully applied in the open community of the trust management system, has become one of the classics in trust management field. The literature used by [3] used subjective logic for studying trust network analysis. In the literature presented in [4] reviewed the current trust and reputation systems. The literature used by [5] used conditional reasoning to extend binomial opinions to multinomial opinions for improving the subjective logic. In the literature presented in [6] pointed out the rich features of bias in the reputation system, which was applicable to many different problems and environments. The literature used by [7] designed the cumulative fusion operator and the average fusion operator for improving the subjective logic. The literature used by [8] extended and redefined mapping from the condition to the result by using subjective logic. The subjective logic provides a good theoretical foundation for trust representation and reasoning for trust management. Therefore, researchers have gradually begun to pay more attention to the research on subjective logic. Huang and Hu [9] considered the time related trust issue and proposed the extended subjective logic model. Using subjective logic, Yuan et al. [10] proposed an anomaly detection framework. Tian et al. [11] proposed a trust model based on subjective logic and the risk mechanism. Some scholars have pointed out that the fusion operator in some cases will produce an unreasonable result [12], but they have not considered that the three tuples (b,d,u) must meet the additivity of probability, in other words, the fact that the value of ‘b+d+u’ must equal one. The modified fusion operator does not meet this requirement. Zhou et al. [13] pointed out that the discounting operator increases the uncertainty in the operation by the fusion operator. They proposed a weight method to improve the fusion operator. This method carries out the discount operation in the calculation of trust value b and the relative uncertainty slightly increases. However, in both [12] and [13], the improved fusion operator does not meet associativity. This limits the practical application of the operator improved by [12] and [13]. Jøsang gives the transitivity (or discounting) operator. But the operator has the following problems: 1) in the trust transfer process, with the increasing depth of the trust chain, the trust discount is too rapid and the results are often inconsistent with the actual situation; 2) when the network node is more and more, the trust chain length is large and the computational complexity increases, which makes it difficult to ensure the practicality of the operator. We recognize that we can use an opinion to express weight. But for simplicity and efficiency, the weight W is set be a real number. As such, we can conceivably set the expectation of the subjective opinion as W.
This paper extends the theory of Jøsang’s subjective logic and proposes an ISLM-ED model. The main work of this paper accomplishing the following tasks: 1) Ensuring that the fusion operator that named the multi-agent unified fusion operator is improved. It is imperative that it not only meets the commutative and associative law but that it is also consistent with researchers’ cognitive rules. 2) Ensuring that the dynamic function for the base rate (a) and non-informative prior weight (C) through the changes of evidence are given. 3) Ensuring that the simulation experiments are carried out and comparing fusion operator proposed by Jøsang and Zhou et al. [13]
3. Jøsang’s Fusion Rule and Its Issues
Jøsang’s subjective logic is based on describing the beta distribution function of two events’ posteriori probability. Subjective logic theory proposes a certainty probability density function by computing an observed positive event ‘r’ and a negative event ‘s’. On this basis, the probability trust of each event produced among entities is calculated.
Jøsang et al. [3] proposed and used subjective logic to model the trust relationship. They introduced evidence space and opinion space to represent and measure the trust relationship and they also proposed a rich set of subjective logic operators for the deduction and calculation of the trust level. Subjective logic introduced subjective uncertainty into the trust notion. As such, it is able to express people’s subjective tendencies better than the classical probability theory can. It formed a set of relatively complete theory based on integrating predecessors’ experience.
Evidence space is comprised of a set of observed events that can be simply divided into a positive event and negative event. Opinion Space is comprised of a set of subjective opinions that can be expressed as
Where
The functions above are called Evidence Mapping Functions.
Let X = {xi | i = 1, …, k} be a frame and let ωX be an opinion on X with belief b and uncertainty mass u. Let a be a base rate vector on X. The function E(X) from X to [0, 1]k is expressed as:
This is called the probability expectation vector over X.
In order to provide an interpretation of the fusion operator in subjective logic, it is useful to consider a process that is observed by two sensors. A distinction can be made between the follow two cases.
The two sensors for the observing the process during disjointed time periods. In this case the observations are independent, and it is natural to simply add the observations from these two sensors. The resulting fusion is called cumulative fusion.
The two sensors for the observing the process during the same time period. In this case, the observations are non independent, and it is natural to take the average of the observations by using the two sensors. The resulting fusion is called averaging fusion.
Cumulative Fusion Rule
Let ω A and ω B be opinions that are respectively held by agents A and B over the same frame X = {xi | i = 1, … , l}. Let ω A⋄B be the opinion such that:
Then ω A⋄B is called the cumulatively fused bba of ω A and ω B, which represents the combination of independent opinions of A and B. By using the symbol ‘⊕’ to designate this belief operator, we define ω A⋄B ≡ ω A ⊕ ω B.
Averaging Fusion Rule
Let ω A and ω B be opinions that are respectively held by agents A and B over the same frame X = {xi | i = 1, … , l}. Let ω A⋄B be the opinion such that:
Then ω A⋄B is called the averaged opinion of ω A and ω B, which represents the combination of the dependent opinions of A and B. By using the symbol ‘⊕’ to designate this belief operator, we define ω A⋄B ≡ ω A ⊕ ω B.
We observed that the computation increases rapidly along with the increase of the number of opinions. The cumulative fusion operator does not consider the time factor. If we use averaging fusion operators for fusion operation, then in more than two agents’ opinion situations a fusion result that is not unique will be produced. The proof for this is given below.
To calculate three agents’ (A, B, C) fusion opinion by averaging fusion rule,
we can see, bA⋄B⋄C (xi) ≠ bA⋄B⋄C (xi). That is to say, the three agents’ fusion opinion result is not uniqueness by Eq. (5). This is because the fusion sequence is different, which is obviously unreasonable.
To sum up, there is the issue that the fusion result is not unique when more than two agents’ opinions by averaging fusion rule. The cause of this issue is that when more than three opinions are fused, the operator does not meet the associative law. Therefore, it is necessary to design the new fusion operator that is able to meet the associative law.
4. The ISLM-ED Model
In this paper, there are three cases in the new fusion operator. They are as listed below:
Only one sensor observes the process during disjoint time periods: in this case, the observations are independent. We need to consider the time factor, and the resulting fusion is called cumulative fusion.
The different sensors observe the process during the same time period: in this case, the observations are independent. We need to consider the weight of the observation sensors, and the resulting fusion is called the averaging fusion.
The different sensors observe the process during disjoint time periods: in this case, we need to consider both the time factor and the weight of the sensors, and the resulting fusion is called the multi-agent unified fusion operator.
4.1 Cumulative Fusion Operator
At the same frame of discernment X and the same agent’s opinions about x for cumulative fusion in different observation periods, because the cumulative fusion opinion is influenced by the observation period, the result may be different. Fig. 1 shows the distance diagram according to observation period.

The distance diagram according to observation period.
Considering the different opinions ωi by the same agent in N periods, (i = 1, 2,…, N), the influence on the fusion opinion can be studied according to the 3 cases listed below and as shown in Fig. 2:
The influence of N periods to the fusion opinion.
Line 1 can be understood as the nearer time to the current, the greater the influence.
Line 2 can be understood as the further time to the current, the greater the influence. For example, a person’s first impressions are the strong.
Line 3 can be understood as the same influence on the fusion opinion among different periods. For example, the observation is a random event, and as such there is no effect on the fusion opinion among periods.
In different frame and environment, the fusion operator can be designed for different functions according to the actual situation. We designed simple function fun1 and fun2 as fusion operator examples, which correspond to line1 and line2 in Fig. 2, respectively. λ (i) denotes the influence coefficient of the opinion in ith period to the cumulative fusion.
Supposing that the ith agents’ opinion are:
4.2 Averaging Fusion Operator
At the same frame of discernment X, the different agents’ opinions about x for averaging fusion in the same observation period. Because the different influences of the fusion opinion come from different agents, we need to consider the weight of the agents only.
The averaging fusion operator is as follows:
WA and WB are weights of the agents A and B, respectively. Both WA and WB, then
The fusion operator in Jøsang’s subjective logic does not meet the associativity law. The multiple opinions fusion algorithm is as follows: for meeting the associativity law, we defined the calculation method of the ‘fusion weight’. For example, the ‘fusion weight’ of the opinion
Supposing that the opinion of the jth observer is
Though the research on the fusion operator above, when two observers hold the same opinion value, the calculation result by the new fusion operator is the same as the opinion value. However, by intuition, the fusion operator should have a cumulative effect. In the new fusion operator of the calculation process, the effect is reflected by the ‘fusion weight.’ In other words, the fusion weight reflects the cumulative effect for the same opinion value. Therefore, we put the fusion weight into ω, and express it as
4.3 Multi-Agent Unified Fusion Operator
At the same frame of discernment X, the different agents’ opinions about x for averaging fusion in the different periods. In this case, we need to integrate the former two fusion operators.
Supposing that the opinion of ith observer in jth periods is
4.4 Fusion Operator Character Proving
Take the averaging fusion operator as an example for proving that the averaging fusion operator meets the commutative and associative law.
Commutativity proving
Due to the symmetry of the new fusion operator, it can be proved easily that the new fusion operator meets commutativity. Here, the proving of the averaging fusion operator meets commutative law is omitted.
Associativity law proving
Without loss of generality, take three opinions as an example of fusion:ω A = {b⃗A,uA, WA}, where ω B = {b⃗B, uB,W B} and ω C = {b⃗C,uC,WC} are the opinion of the agents of A, B, C on the X. Proving the associativity law only needs to prove that the following equation hold. Take b as an example of fusion.
The same can be said for u satisfies associativity.
4.5 Dynamic Function of the Base Rate with Evidence Driven
Assuming that there are M observations in each observation period, ri denotes the positive evidence number of the ith period and si denotes the negative evidence number of the ith period. ai denotes the base rate of the ith period. First, it needs to analyze the evidence in terms of how to drive the change of the base rate through the first and second observation. Then, it needs to design the dynamic function of the base rate.
If r1 = r2, it means that the positive evidence number of the second observation is equal to the first. Because the sensor observes M times in each period, we have s1 = s2. That is to say, the result of the second observation is the same as the first observation. Therefore, the base rate should not have any changes occur.
If r2 > r1, the positive evidence number of the second observation is more than the first. So, the base rate should increase, that is, mean a2 > a1, and vice versa.
Let η = (|r2 - r1|/M)λ and λ be the adjustment coefficient, (λ>=1). The larger the λ is, the less sensitive the base rate is to the change of the evidence. If we do not consider the time effectiveness of the evidence, we have:
if r1 > r2, a2= a1+(1-a1)η;
if r1 < r2, a2=(a1-η)/(1-η).
Similarly, we can deduce the ai+1 by ai,
Let η = (|ri+1 - ri|/ M)λ, which gives us:
Because the last evidence on the effect of the base rate is considered in each of the computing processes, ai+1 already includes the effect of the former i period of evidence.
If considering the evidence of time effectiveness, the last period of evidence should be discounted because of the passing of time. We only need η = (|ri+1 - kri|/si)λ, 0<k<1, and k is the discount coefficient.
4.6 Non-Informative Prior Weight with Evidence Driven
According to Jøsang’s evidence space mapping concept space theory, they define the number of negative evidences and positive evidences. The number of uncertain evidences should define the non-informative prior weight C before the observation period. This uncertainty that reflects on the evidence is expressed as the changes of the positive evidence numbers in different periods. There is a close relationship between C and the observation evidence. We give the definition of the non-informative prior weight C based on the obtained evidence in different observation periods.
There are M observations in each observation period and N observation periods in total. ri denotes the positive evidence number of the ith period. MAXi and MINi denotes the maximum and minimum value of the positive evidence number in the former i periods.
Next, there are two groups of different observation data (see in Tables 1 and 2) in three periods for describing C’s design idea by analysis and comparison.

The first group of the observation data

The second group of the observation data
We found that that the positive evidence number increases as it changes. It changes from 30 to 40 in the second observation period of the first group, while it decreases as it changes in the second group (from 30 to 32). These changes reflect the changes in uncertainty levels. That is to say, the greater the change of the positive evidence number, the larger the uncertainty is. According to the formulas provided in (19) and (20), we can get the dynamic change of C.
5. Simulation Experiment
The experiment dataset was selected from the KDDCUP99 [17]. The 1999 KDD intrusion detection contest used the 1998 DARPA intrusion detection dataset to construct the connection records and to extract the object features. The 1998 DARPA intrusion detection dataset was acquired from nine weeks of raw TCP dumped data for a local area network (LAN) simulating a typical US Air Force LAN that was peppered with the following four main categories of attacks: DoS, Probe, U2R, and R2L. A connection record is a sequence of TCP packets starting and ending at some well-defined times, between which data flows to and from a source IP address to a target IP address under some well-defined protocol. Each connection is labeled as either normal, or as a specific type of attack. So, a normal record is defined as a positive event and an attack record is defined a negative event. We selected the 36,000th–42,000th records from the corrected data as experiment data. Assume that there are 600 records in each observation period and that there are 10 observation periods. Six observers gave each of the 600 records separately. That is to say, each observer provided 100 records. In order to use the new consensus operator, assume that the six observers’ weights were {0.5, 0.9, 0.7, 0.6, 0.8, and 0.8}. The statistical normal event number as positive evidence, the description see Table 3.
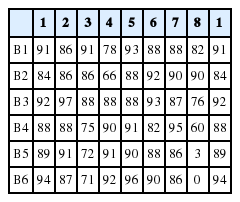
The statistical positive evidence event number
Based on the data in Table 3, we compared and analyzed the ISLM-ED model, the model of contribution [13], and Jøsang’s model [16]. In the ISLM-ED model, the initial base rate was a0=0.8. The discount coefficient was k=1, which means without consider the time effectiveness of evidence.
We could calculate all of the opinions by formula (1) and the opinion expectation by formula (2).
We calculated for 10 periods of the opinion expectations, respectively, as shown in Table 4 and Fig. 3.
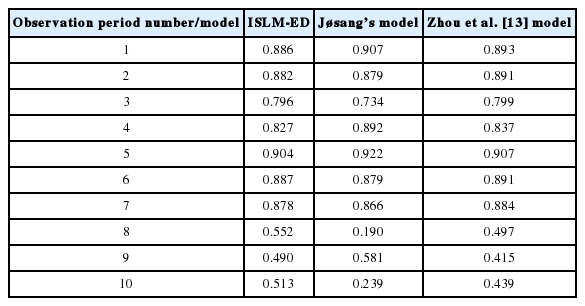
The opinion expectation in 10 observation periods using three models
The opinion expectation in 10 observation periods. ISLM-ED=Improved Subjective Logic Model with Evidence Driven.
It can be directly observed via Fig. 3, that the network state is stable in the previous seven observation periods, that the expectation of the opinion changes little, and that the development trends in the three models are consistent. During the eighth observation, the expectation values decreased dramatically, which indicates that the network state decreased sharply and suffered an attack. The reflection of the eighth observation period for the 600 records is consistent with other periods. However, when the network state changes, it does not take into account the effect of the previous observation in Jøsang’s model. The expectation value of the opinion is too sensitive to dramatic changes that go quickly from 0.866 down to 0.190. According to the analysis in Section 3, we know that the fusion result is not unique and that it is inaccurate when using Jøsang’s fusion operator. In the ISML-ED model, a and C will change dynamically. This not only clearly reflects the change, but also not to be too sensitive; it can be more accurately reflect the actual situation of the network. Both the ISML-ED model and the contribution made by [13] have taken into consideration the effect of weight in the fusion operation of the opinion, and as shown in the Fig. 3, ISML-ED model and the contribution make by [13] are basically the same. However, for the computational complexity, the ISML-ED model is smaller than the model in the contribution made by [13]. What’s more, the fusion operator meets the associativity law in the fusion process in the ISML-ED model, while the others model do not meet this.
6. Conclusions
In this paper, we expand and enrich Jøsang’s subjective logic theory with the hope that this work can promote the development of the trust theory. The tasks include the multi-agent unified fusion operator and the dynamic function of the base rate (a) and non-informative prior weight (C). The multi-agent unified fusion operator is given by us. Finally, the results of the simulation experiments show that the ISLM-ED model is more reasonable and effective, and that it can better adapt to the changing environment. In our study, we have discovered that figuring out how to allocate the weights of observer is the next primary study that needs to be undertaken.
Acknowledgement
This work was supported in part by The National Natural Science Foundation of China (No. 61170254 and No. 60873203), the University of Hebei Province’s Science and Technology Research Program (No. ZH2012029), the Natural Science Foundation of Hebei province (No. F2014201117), the project as level of school of Handan College in 2014 (Electronic commerce model based on extended subjective logic, No. 14209) and the Handan city science and technology research and development program project (The Internet of things node authentication technology research based on trusted computing, No. 1221103041G).
References
Biography
Jiao-Hong Qiang http://orcid.org/0000-0002-9840-6070
He received his M.S. degree in computer application technology from Hebei University, China in June 2008. He is currently working towards his Ph.D. degree in management science and engineering at Hebei University, China. His current research interest includes network security and trust management.

Wang-Xin Xin
She received her M.S. degree from Hebei University, China in June 2005. She works in Hebei University of Science and Technology. Her current research interest includes the art of management and software test.

Tian Jun Feng
He borned in 1965, Ph.D. professor. Tutor of doctoral students, graduated from the Department of electronics, Hebei University in 1986. In 2004, he graduated from University of Science and Technology of China major in computer science and technology. Director of CCF.
